面對這樣的挑戰(zhàn),,近日,特斯聯(lián)首席科學(xué)家,、特斯聯(lián)國際總裁邵嶺博士及其合作團(tuán)隊發(fā)布最新研發(fā)成果,,探索基于孿生網(wǎng)絡(luò)(Siamese Networks)的自適應(yīng)視覺目標(biāo)跟蹤技術(shù),并提出一種緊湊的潛在網(wǎng)絡(luò)(Compact Latent Network,,簡稱:CLNet)以提高跟蹤算法在復(fù)雜場景中的性能和魯棒性,。目前,該研究成果已被人工智能領(lǐng)域頂級學(xué)術(shù)期刊IEEE T-PAMI收錄,,題為:Adaptive Siamese Tracking with a Compact Latent Network,。
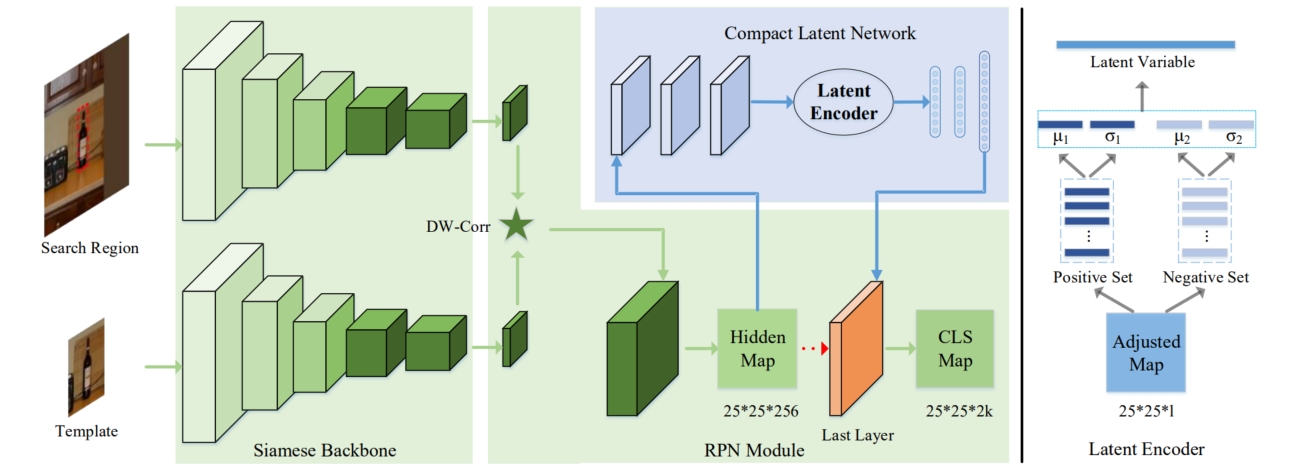
通過緊湊潛在網(wǎng)絡(luò)(CLNet)調(diào)整基于孿生網(wǎng)絡(luò)的跟蹤器的流程圖
以下為論文原文摘錄。
邵嶺博士及其合作團(tuán)隊提供了一種直觀視角,,通過將跟蹤任務(wù)轉(zhuǎn)換為分類問題來簡化基于孿生網(wǎng)絡(luò)的跟蹤器,。在這一視角下,團(tuán)隊通過視覺模擬和真實的跟蹤示例進(jìn)行深入分析,,發(fā)現(xiàn)某些挑戰(zhàn)性情況下的失敗案例可被歸因于離線訓(xùn)練中缺少決定性樣本的問題,。
網(wǎng)球賽場的鷹眼判罰(圖片來源于網(wǎng)絡(luò))
初始(第一)幀中的樣本因其包含豐富的序列特定信息,可被視為代表整個序列的決定性樣本。為快速適應(yīng)基礎(chǔ)模型以適應(yīng)場景,,團(tuán)隊通過充分利用決定性樣本,,提出CLNet。具體而言,,團(tuán)隊通過有效提取序列特定信息,,提出了一種基于統(tǒng)計的緊湊潛在特征以實現(xiàn)快速調(diào)整。此外,,為進(jìn)一步提高所提出CLNet的辨別能力,,團(tuán)隊設(shè)計了一種全新的多樣化樣本挖掘策略用于訓(xùn)練。最后,,團(tuán)隊提出了一種條件更新策略,,以高效更新基礎(chǔ)模型從而處理跟蹤階段的場景變化。
為評估該方法的泛化能力和有效性,,團(tuán)隊采用該方法調(diào)整三個經(jīng)典的基于孿生網(wǎng)絡(luò)的跟蹤器,,即:SiamRPN++、SiamFC,,以及SiamBAN,。在六個數(shù)據(jù)集上的廣泛實驗結(jié)果表明,所有三個調(diào)整后的跟蹤器在準(zhǔn)確性方面均獲得了卓越的性能,,并同時具備高運(yùn)行速度。
除運(yùn)動競技外,,該研究成果在自動駕駛,、機(jī)器人導(dǎo)航與交互、醫(yī)療影像分析,、工業(yè)自動化,、航空航天等公域現(xiàn)實場景中亦擁有廣泛的應(yīng)用前景。如,,在自動駕駛汽車中,,目標(biāo)跟蹤可以幫助車輛實時監(jiān)測周圍其他車輛、行人和障礙物的位置變化,,對駕駛決策和避障系統(tǒng)至關(guān)重要,;在制造業(yè)中,目標(biāo)跟蹤可用于自動化生產(chǎn)線上的工件定位,、質(zhì)量檢測和流程控制,;在航空航天領(lǐng)域,目標(biāo)跟蹤則可用于追蹤和監(jiān)測飛行器或衛(wèi)星的運(yùn)行狀態(tài),,等,。
特斯聯(lián)矢志推動前沿技術(shù)的突破及面向落地的解決方案的研發(fā),將進(jìn)一步發(fā)揮其AIoT稟賦,以科技解決現(xiàn)實世界的真實挑戰(zhàn),。
 渝公網(wǎng)安備 50010302002747號? | Designed by UDL
渝公網(wǎng)安備 50010302002747號? | Designed by UDL